Note
Go to the end to download the full example code.
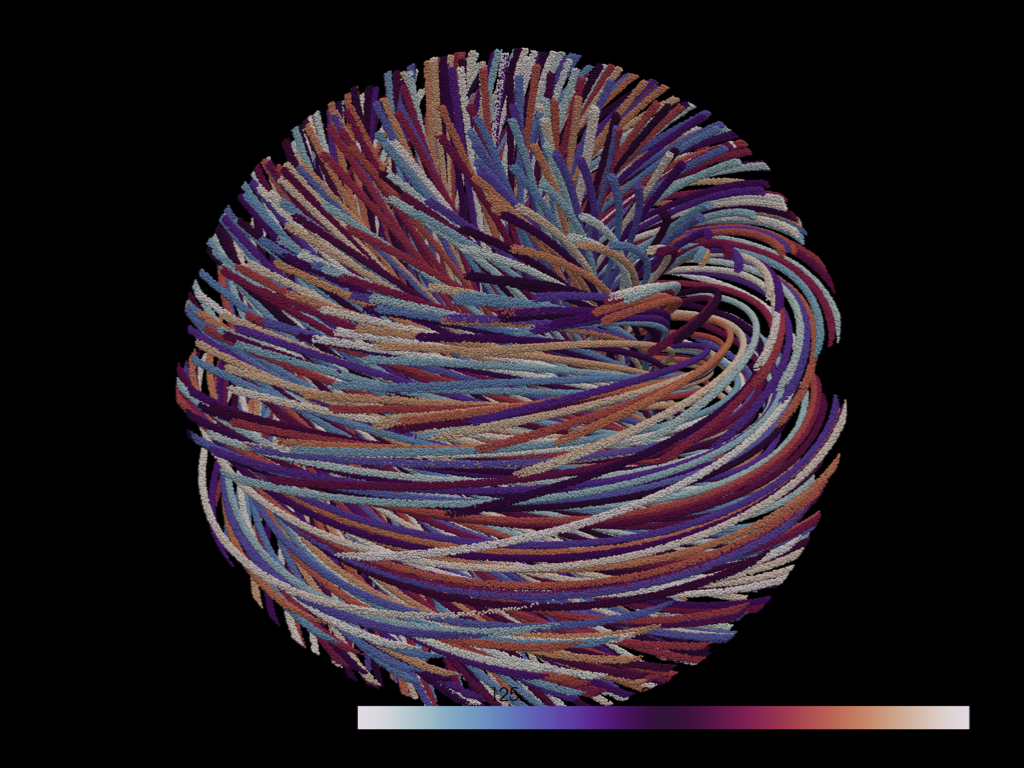
Constant Offset Surfaces#
Uniformly sampling points from a surface in orientation space that puts a given body vector at a constant angular offset from a given vector
import pyvista as pv
import mirage as mr
import mirage.vis as mrv
p = pv.Plotter()
n = int(1e4)
vb = mr.rand_unit_vectors(1) # the body frame to offset from
for i in range(500):
# The vector we want to be offset from by the given angle
vi = mr.rand_unit_vectors(1) # offset vector, in inertial
# alpha = np.full((vi.shape[0]), 0.5) # offset angle, rad
alpha = 0.02
quats_inertial_to_body = mr.random_offset_quaternions(
vi, vb, alpha, size=n, boundary_only=False
)
dcm_inertial_to_body = mr.quat_to_dcm(quats_inertial_to_body)
mrps = mr.dcm_to_mrp(dcm_inertial_to_body)
# assert np.allclose(
# mr.angle_between_vecs(mr.stack_mat_mult_vec(dcm_inertial_to_body, vi), vb), alpha
# )
mrv.scatter3(p, mrps, point_size=5, scalars=mrps.shape[0] * [i], cmap='twilight')
p.set_background('k')
p.show()
Total running time of the script: (0 minutes 17.097 seconds)