Note
Go to the end to download the full example code.
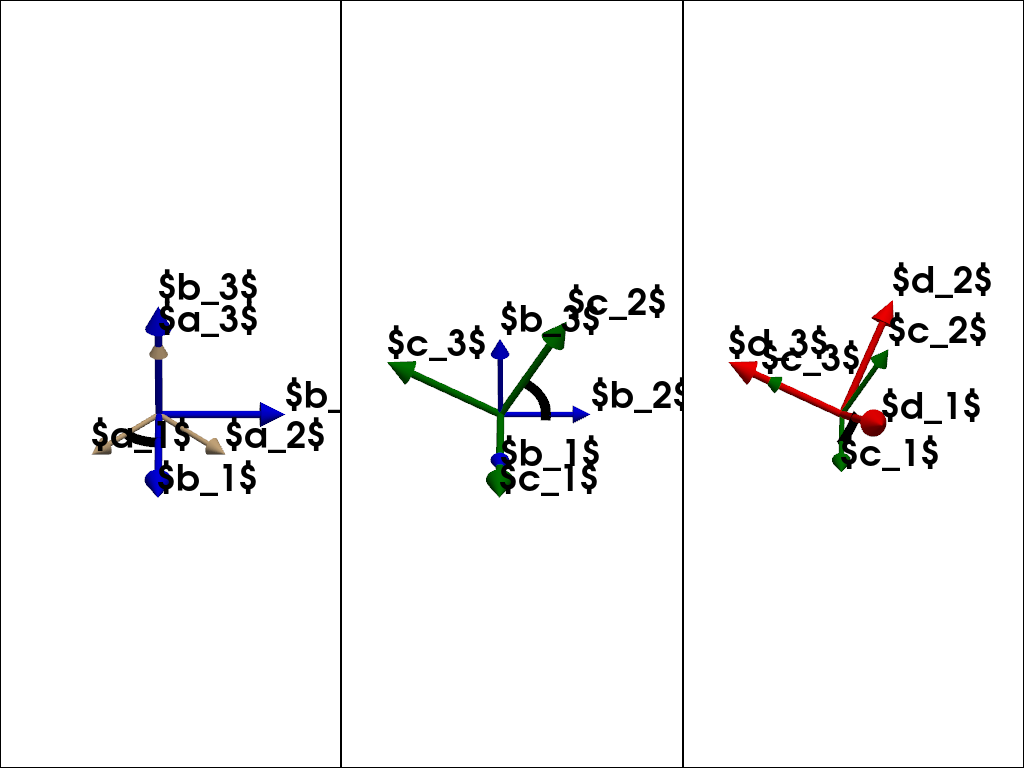
Euler Angle Sequence#
Three consecutive axis rotations forming an Euler angle sequence
import numpy as np
import pyvista as pv
import mirage as mr
import mirage.vis as mrv
Let’s get the body axis rotation matrices and define an Euler (3-1-3) sequence
r1, r2, r3 = mr.r3(np.pi / 4), mr.r1(np.pi / 3), mr.r3(np.pi / 5)
a = np.eye(3)
ap = r1
app = r2 @ ap
appp = r3 @ app
sc, d = 1.4, 0.5
pl = pv.Plotter(shape=(1, 3))
pl.subplot(0, 0)
mrv.plot_basis(pl, a.T, labels='a')
mrv.plot_basis(pl, ap.T, labels='b', color='blue', scale=sc)
mrv.plot_angle_between(pl, a[0, :], ap[0, :], center=np.array([0, 0, 0]), dist=d)
pl.subplot(0, 1)
mrv.plot_basis(pl, ap.T, labels='b', color='blue')
mrv.plot_basis(pl, app.T, labels='c', color='green', scale=sc)
mrv.plot_angle_between(pl, ap[1, :], app[1, :], center=np.array([0, 0, 0]), dist=d)
pl.subplot(0, 2)
mrv.plot_basis(pl, app.T, labels='c', color='green')
mrv.plot_basis(pl, appp.T, labels='d', color='red', scale=sc)
mrv.plot_angle_between(pl, app[0, :], appp[0, :], center=np.array([0, 0, 0]), dist=d)
pl.link_views()
pl.view_isometric()
pl.camera.zoom(0.8)
pl.show()
Total running time of the script: (0 minutes 0.164 seconds)