Note
Go to the end to download the full example code.
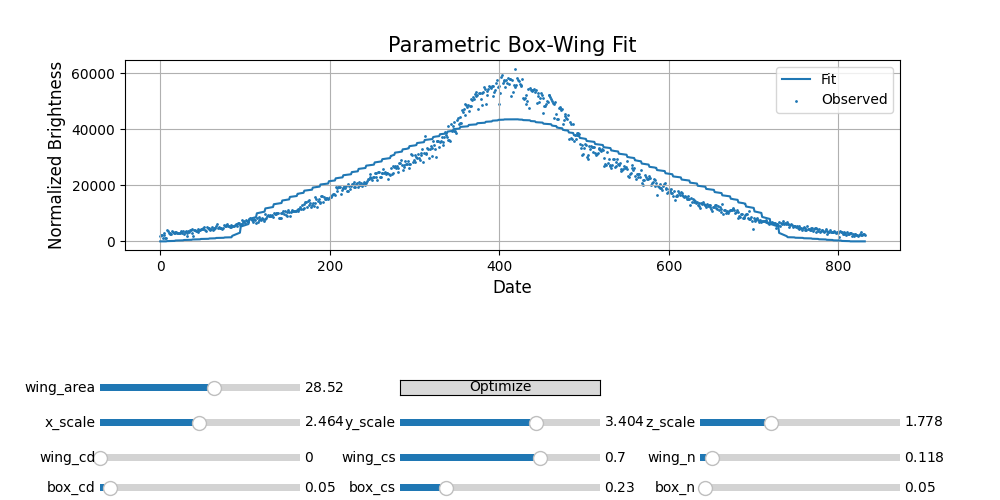
Parametric Box-Wing Inversion#
import datetime
from typing import Any
import matplotlib.pyplot as plt
import numpy as np
from matplotlib.widgets import Button, Slider
from scipy.io import loadmat
from scipy.optimize import minimize
import mirage as mr
import mirage.vis as mrv
vars_enum = [
'x_scale',
'y_scale',
'z_scale',
'wing_area',
'cd_wing',
'cd_box',
'cs_box',
'cs_wing',
'n_box',
'n_wing',
]
def construct_from_y(attitude, y: np.ndarray, knowns: dict):
for k, v in knowns.items():
y[vars_enum.index(k)] = v
cd_wing = np.clip(y[4], 0, 1)
cd_box = np.clip(y[5], 0, 1)
cs_box = np.clip(y[6], 0, 1)
cs_wing = np.clip(y[7], 0, 1)
y = np.clip(y, 1e-8, np.inf)
n_box, n_wing = y[8], y[9]
brdf_box = mr.Brdf(name=brdf_name, cd=cd_box, cs=cs_box, n=n_box, validate=False)
brdf_wing = mr.Brdf(
name=brdf_name, cd=cd_wing, cs=cs_wing, n=n_wing, validate=False
)
return BoxWingParametric(
attitude,
brdf_box,
brdf_wing,
x_scale=y[0],
y_scale=y[1],
z_scale=y[2],
wing_area=y[3],
)
class BoxWingParametric:
def __init__(
self,
attitude: mr.AlignedAndConstrainedAttitude,
brdf_box: mr.Brdf,
brdf_wing: mr.Brdf,
x_scale: float = 1.0,
y_scale: float = 1.0,
z_scale: float = 1.0,
wing_area: float = 1.0,
):
self.attitude = attitude
self.brdf_box = brdf_box
self.brdf_wing = brdf_wing
self._cube_template = mr.SpaceObject('cube.obj')
self._cube_template.v /= np.sqrt(self._cube_template.unique_areas[0])
self.box = mr.SpaceObject(
vertices_and_faces=(self._cube_template.v, self._cube_template.f)
)
self.scales = [x_scale, y_scale, z_scale]
self.wing_area = wing_area
@property
def scales(self):
return self._scales
@scales.setter
def scales(self, scales):
self._scales = scales
self.box.v = self._cube_template.v.copy()
self.box.v[:, 0] = self.box.v[:, 0] * scales[0]
self.box.v[:, 1] = self.box.v[:, 1] * scales[1]
self.box.v[:, 2] = self.box.v[:, 2] * scales[2]
self.box = mr.SpaceObject(vertices_and_faces=(self.box.v, self.box.f))
def eval(
self,
dates: np.ndarray[datetime.datetime, Any],
ovi: np.ndarray,
jds: np.ndarray = None,
eci_to_body: np.ndarray = None,
vc_eci: np.ndarray = None,
) -> np.ndarray:
if jds is None:
jds = mr.date_to_jd(dates)
if eci_to_body is None:
eci_to_body = self.attitude.dcms_at_dates(dates)
if vc_eci is None:
vc_eci = self.attitude.const_interpolator(jds)
ovb = mr.stack_mat_mult_vec(eci_to_body, ovi)
vc_body = mr.stack_mat_mult_vec(eci_to_body, vc_eci)
box_lc = self.box.convex_light_curve(self.brdf_box, svb=vc_body, ovb=ovb)
wing_lc = (
self.wing_area
* self.brdf_wing.eval_normalized_brightness(
L=vc_body, O=ovb, N=vc_body
).flatten()
)
box_lc *= count_rate * integration_time_s / (rmag * 1e3) ** 2 * isun
wing_lc *= count_rate * integration_time_s / (rmag * 1e3) ** 2 * isun
return box_lc, wing_lc
def optimize(
self,
dates: np.ndarray[datetime.datetime, Any],
ovi: np.ndarray,
lc_unit_observed: np.ndarray,
knowns: dict = None,
):
if knowns is None:
knowns = dict()
if hasattr(lc_unit_observed, 'mask'):
valid_inds = ~lc_unit_observed.mask
else:
valid_inds = ~np.isnan(lc_unit_observed)
# valid_inds &= (data_index < 350) | (data_index > 500)
jds = mr.date_to_jd(dates)
eci_to_body = self.attitude.dcms_at_dates(dates)
vc_eci = self.attitude.const_interpolator(jds)
def objective(y: np.ndarray) -> float:
bwpi = construct_from_y(self.attitude, y, knowns)
box_lc, wing_lc = bwpi.eval(dates, ovi, jds, eci_to_body, vc_eci)
err = np.linalg.norm(
lc_unit_observed[valid_inds] - (box_lc + wing_lc)[valid_inds]
)
return err
opt_sol = minimize(objective, y_from_bwp(self), options={'maxiter': 1})
return construct_from_y(self.attitude, opt_sol.x, knowns)
def __repr__(self):
return f'BoxWingParametric(attitude={self.attitude}, brdf_box={self.brdf_box}, brdf_wing={self.brdf_wing}, x_scale={self.scales[0]}, y_scale={self.scales[1]}, z_scale={self.scales[2]}, wing_area={self.wing_area})'
def y_from_bwp(bwp: BoxWingParametric):
return np.array(
[
bwp.scales[0],
bwp.scales[1],
bwp.scales[2],
bwp.wing_area,
bwp.brdf_wing.cd,
bwp.brdf_box.cd,
bwp.brdf_box.cs,
bwp.brdf_wing.cs,
bwp.brdf_box.n,
bwp.brdf_wing.n,
]
)
orbit_sol_path = '/Users/liamrobinson/Library/CloudStorage/OneDrive-purdue.edu/pogs/2022/2022-09-18/ProcessedData/Fitted_Orbits/OrbitSolutions.mat'
orbit_mat = loadmat(orbit_sol_path)
sol_mat = {
k: orbit_mat['CuratedObjects'][0][k][0].squeeze()
for k in orbit_mat['CuratedObjects'][0].dtype.names
}
sol_mat['JD'] = np.sum(sol_mat['JD'], axis=0)
dates = mr.jd_to_date(sol_mat['JD'])
rmag = mr.vecnorm(sol_mat['r'].T).flatten()
isun = mr.total_solar_irradiance_at_dates(dates)
lc_norm_true = sol_mat['brightness']
epsecs = mr.date_to_epsec(dates)
data_index = np.arange(epsecs.size)
station = mr.Station()
station.constraints = [
mr.SnrConstraint(3),
mr.ElevationConstraint(10),
mr.TargetIlluminatedConstraint(),
mr.ObserverEclipseConstraint(station),
mr.VisualMagnitudeConstraint(20),
mr.MoonExclusionConstraint(10),
]
obj = mr.SpaceObject('matlib_gps_iii.obj', identifier='NAVSTAR 80 (USA 309)')
r_obj_j2k = obj.propagate(dates)
sv = mr.sun(dates)
nadir = -mr.hat(r_obj_j2k)
attitude = mr.AlignedAndConstrainedAttitude(
v_align=nadir,
v_const=sv,
dates=dates,
axis_order=(2, 0, 1),
)
vars_enum = [
'x_scale',
'y_scale',
'z_scale',
'wing_area',
'cd_wing',
'cd_box',
'cs_box',
'cs_wing',
'n_box',
'n_wing',
]
brdf_name = 'cook-torrance'
brdf_wing = mr.Brdf(brdf_name, cd=0.0, cs=0.7, n=0.12)
brdf_box = mr.Brdf(brdf_name, cd=0.05, cs=0.23, n=0.05)
station_pos_eci = station.j2000_at_dates(dates)
object_pos_eci = obj.propagate(dates)
ovi = mr.hat(station_pos_eci - object_pos_eci)
z_obs = mr.angle_between_vecs(station_pos_eci, -ovi)
ovb = mr.stack_mat_mult_vec(attitude.dcms_at_dates(dates), ovi)
integration_time_s = 4
spec = mr.scaled_solar_spectrum(1)
count_rate = mr.integrated_spectrum(station, z_obs, spectrum=spec)
wing_area = 28.5212 # m^2
x_scale = 2.4638 # m
y_scale = 3.4036 # m
z_scale = 1.778 # m
knowns = dict(
wing_area=wing_area,
x_scale=x_scale,
y_scale=y_scale,
z_scale=z_scale,
)
bwp = BoxWingParametric(attitude, brdf_box, brdf_wing)
box_lc, wing_lc = bwp.eval(dates, ovi)
fig, ax = plt.subplots(figsize=(10, 5))
plt.subplots_adjust(bottom=0.5)
blc = plt.plot(data_index, box_lc + wing_lc, label='Fit')
plt.scatter(data_index, lc_norm_true, label='Observed', s=1)
mrv.texit('Parametric Box-Wing Fit', 'Date', 'Normalized Brightness')
plt.legend()
def _update_blc():
box_lc, wing_lc = bwp.eval(dates, ovi)
blc[0].set_ydata(box_lc + wing_lc)
plt.draw()
def update_box_n(val):
bwp.brdf_box.n = val
_update_blc()
def update_wing_n(val):
bwp.brdf_wing.n = val
_update_blc()
def update_box_cd(val):
bwp.brdf_box.cd = val
_update_blc()
def update_wing_cd(val):
bwp.brdf_wing.cd = val
_update_blc()
def update_box_cs(val):
bwp.brdf_box.cs = val
_update_blc()
def update_wing_cs(val):
bwp.brdf_wing.cs = val
_update_blc()
def update_wing_area(val):
bwp.wing_area = val
_update_blc()
def update_x_scale(val):
bwp.scales = [val, bwp.scales[1], bwp.scales[2]]
_update_blc()
def update_y_scale(val):
bwp.scales = [bwp.scales[0], val, bwp.scales[2]]
_update_blc()
def update_z_scale(val):
bwp.scales = [bwp.scales[0], bwp.scales[1], val]
_update_blc()
dy = 0.07
slider_box_cd = Slider(
plt.axes([0.1, 0.01, 0.2, 0.03]), 'box_cd', 0, 1, valinit=brdf_box.cd
)
slider_box_cd.on_changed(update_box_cd)
slider_box_cs = Slider(
plt.axes([0.4, 0.01, 0.2, 0.03]), 'box_cs', 0, 1, valinit=brdf_box.cs
)
slider_box_cs.on_changed(update_box_cs)
slider_box_n = Slider(
plt.axes([0.7, 0.01, 0.2, 0.03]), 'box_n', 1e-8, 2, valinit=brdf_box.n
)
slider_box_n.on_changed(update_box_n)
slider_wing_cd = Slider(
plt.axes([0.1, dy, 0.2, 0.03]), 'wing_cd', 0, 1, valinit=brdf_wing.cd
)
slider_wing_cd.on_changed(update_wing_cd)
slider_wing_cs = Slider(
plt.axes([0.4, dy, 0.2, 0.03]), 'wing_cs', 0, 1, valinit=brdf_wing.cs
)
slider_wing_cs.on_changed(update_wing_cs)
slider_wing_n = Slider(
plt.axes([0.7, dy, 0.2, 0.03]), 'wing_n', 1e-8, 2, valinit=brdf_wing.n
)
slider_wing_n.on_changed(update_wing_n)
slider_x_scale = Slider(
plt.axes([0.1, 2 * dy, 0.2, 0.03]), 'x_scale', 1e-8, 5, valinit=x_scale
)
slider_x_scale.on_changed(update_x_scale)
slider_y_scale = Slider(
plt.axes([0.4, 2 * dy, 0.2, 0.03]), 'y_scale', 1e-8, 5, valinit=y_scale
)
slider_y_scale.on_changed(update_y_scale)
slider_z_scale = Slider(
plt.axes([0.7, 2 * dy, 0.2, 0.03]), 'z_scale', 1e-8, 5, valinit=z_scale
)
slider_z_scale.on_changed(update_z_scale)
slider_wing_area = Slider(
plt.axes([0.1, 3 * dy, 0.2, 0.03]), 'wing_area', 1e-8, 50, valinit=wing_area
)
slider_wing_area.on_changed(update_wing_area)
def _update_sliders_from_bwp(bwpi: BoxWingParametric):
slider_box_cd.set_val(bwpi.brdf_box.cd)
slider_box_cs.set_val(bwpi.brdf_box.cs)
slider_box_n.set_val(bwpi.brdf_box.n)
slider_wing_cd.set_val(bwpi.brdf_wing.cd)
slider_wing_cs.set_val(bwpi.brdf_wing.cs)
slider_wing_n.set_val(bwpi.brdf_wing.n)
slider_x_scale.set_val(bwpi.scales[0])
slider_y_scale.set_val(bwpi.scales[1])
slider_z_scale.set_val(bwpi.scales[2])
slider_wing_area.set_val(bwpi.wing_area)
plt.draw()
def _opt_button_callback(*args):
global bwp
bwp = bwp.optimize(dates, ovi, lc_norm_true, knowns=knowns)
_update_sliders_from_bwp(bwp)
_update_blc()
opt_button = Button(plt.axes([0.4, 3 * dy, 0.2, 0.03]), 'Optimize')
opt_button.on_clicked(_opt_button_callback)
_opt_button_callback()
# bwp_reconstructed = construct_from_y(attitude, y_from_bwp(bwp), knowns)
# print(repr(bwp_reconstructed))
# print(repr(bwp))
plt.show()
Total running time of the script: (0 minutes 1.307 seconds)