Note
Go to the end to download the full example code.
Results#
/Users/liamrobinson/Documents/maintained-research/mirage/examples/15-attitude-sdc-2025/results.py:157: SyntaxWarning: invalid escape sequence '\p'
label='Computed $\pm3\sigma$',
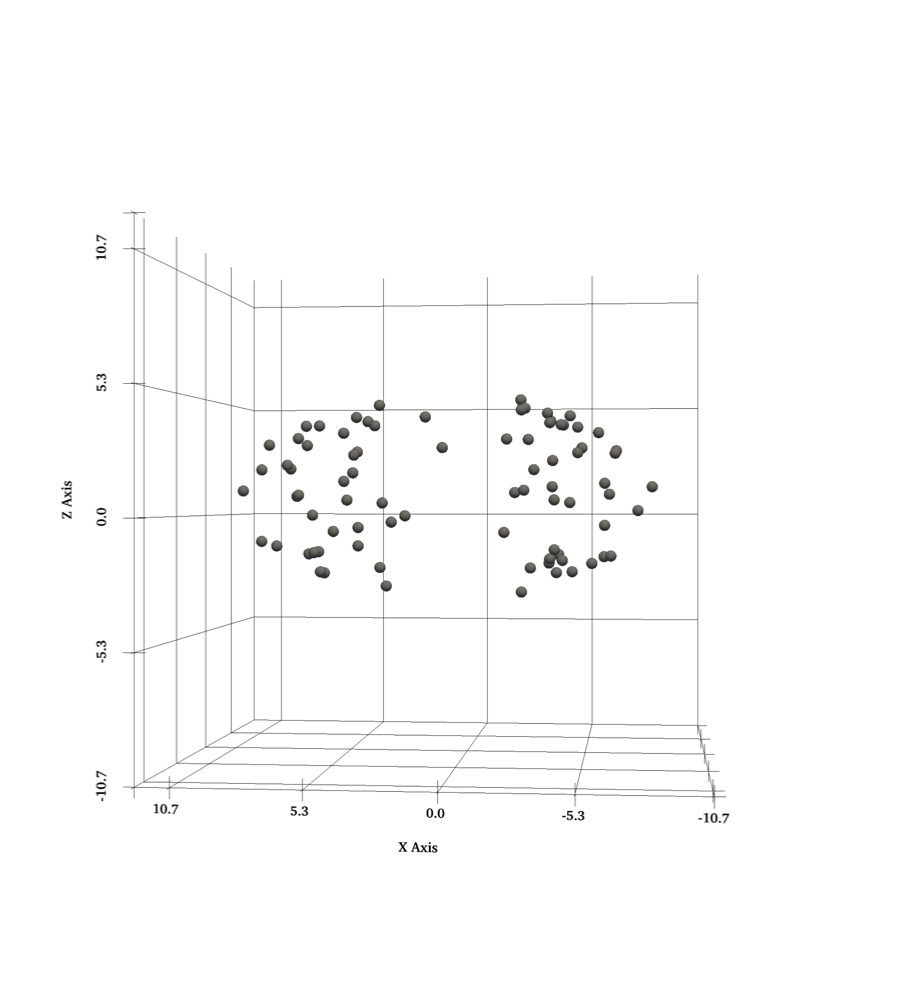
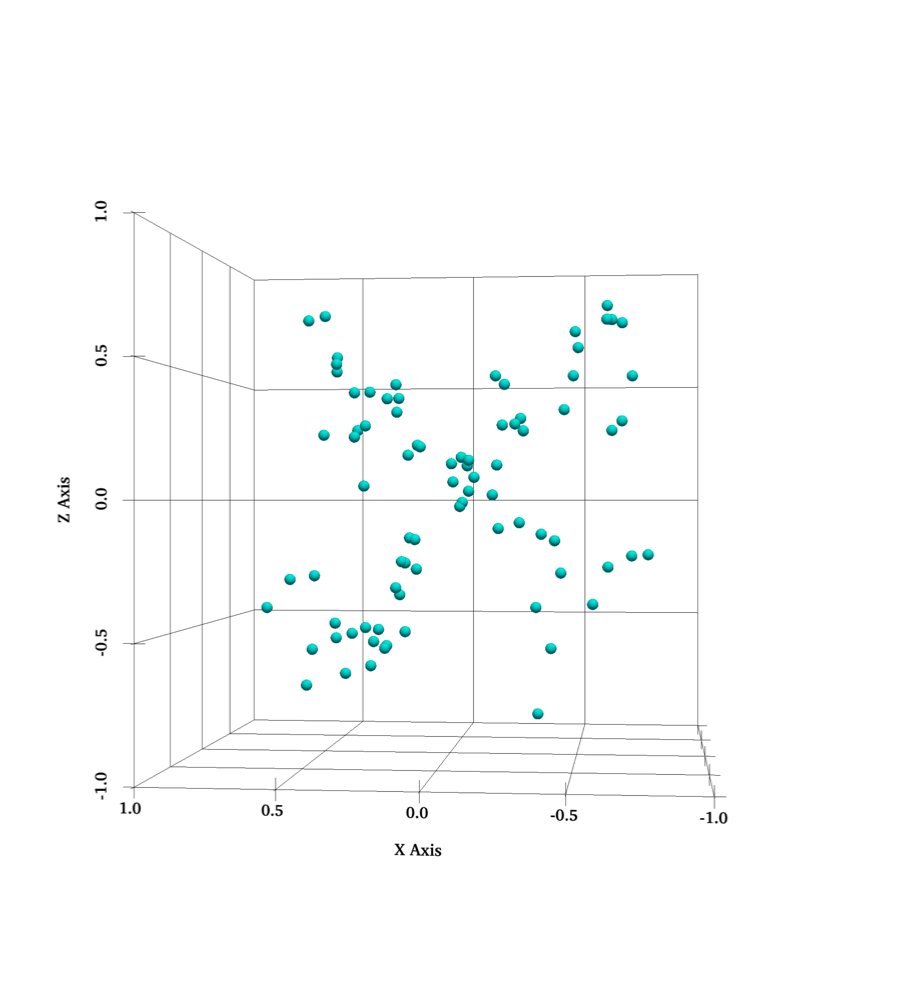
delta max search omega in deg/s 6.928406466512701
82 solutions found meeting bound=0.01
IMAGEIO FFMPEG_WRITER WARNING: input image is not divisible by macro_block_size=16, resizing from (900, 1000) to (912, 1008) to ensure video compatibility with most codecs and players. To prevent resizing, make your input image divisible by the macro_block_size or set the macro_block_size to 1 (risking incompatibility).
IMAGEIO FFMPEG_WRITER WARNING: input image is not divisible by macro_block_size=16, resizing from (900, 1000) to (912, 1008) to ensure video compatibility with most codecs and players. To prevent resizing, make your input image divisible by the macro_block_size or set the macro_block_size to 1 (risking incompatibility).
[np.float64(-0.45), np.float64(0.24), np.float64(-0.28), np.float64(0.15), np.float64(0.02), np.float64(0.01), np.float64(2.41), np.float64(1.79)]
shape: (2,)
Series: '' [f64]
[
1.716292
1.716292
]
[np.float64(0.31), np.float64(-1.81), np.float64(0.08), np.float64(-0.04), np.float64(-0.07), np.float64(0.01), np.float64(1.14), np.float64(1.16)]
shape: (2,)
Series: '' [f64]
[
1.716292
1.716292
]
[np.float64(-1.11), np.float64(0.12), np.float64(-1.77), np.float64(0.09), np.float64(0.01), np.float64(-0.05), np.float64(1.91), np.float64(1.47)]
shape: (2,)
Series: '' [f64]
[
1.716292
1.716292
]
[np.float64(0.39), np.float64(-0.14), np.float64(0.28), np.float64(-0.11), np.float64(0.0), np.float64(0.05), np.float64(1.86), np.float64(1.89)]
shape: (2,)
Series: '' [f64]
[
1.716292
1.716292
]
[np.float64(-0.32), np.float64(0.4), np.float64(0.26), np.float64(-0.07), np.float64(-0.04), np.float64(-0.05), np.float64(1.67), np.float64(1.76)]
shape: (2,)
Series: '' [f64]
[
1.716292
1.716292
]
[np.float64(0.25), np.float64(-0.3), np.float64(0.36), np.float64(-0.1), np.float64(0.01), np.float64(-0.05), np.float64(1.79), np.float64(1.71)]
shape: (2,)
Series: '' [f64]
[
1.716292
1.716292
]
[np.float64(-0.59), np.float64(-1.71), np.float64(0.98), np.float64(-0.09), np.float64(-0.03), np.float64(0.05), np.float64(2.09), np.float64(2.39)]
shape: (2,)
Series: '' [f64]
[
1.716292
1.716292
]
[np.float64(-0.78), np.float64(0.39), np.float64(-0.2), np.float64(-0.08), np.float64(-0.0), np.float64(0.0), np.float64(1.24), np.float64(1.86)]
shape: (2,)
Series: '' [f64]
[
1.716292
1.716292
]
[np.float64(0.17), np.float64(-0.44), np.float64(0.22), np.float64(-0.12), np.float64(-0.04), np.float64(0.0), np.float64(1.74), np.float64(1.77)]
shape: (2,)
Series: '' [f64]
[
1.716292
1.716292
]
[np.float64(-0.62), np.float64(0.22), np.float64(0.69), np.float64(0.15), np.float64(-0.03), np.float64(0.02), np.float64(2.03), np.float64(2.68)]
shape: (2,)
Series: '' [f64]
[
1.716292
1.716292
]
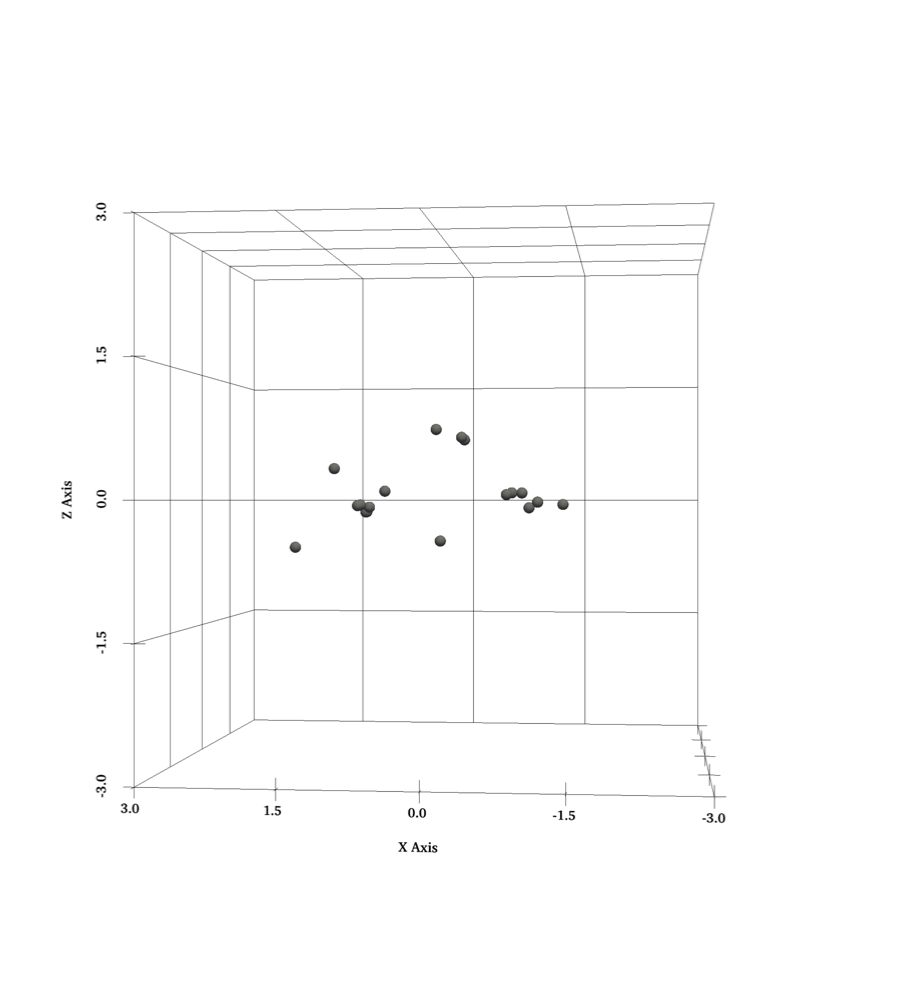
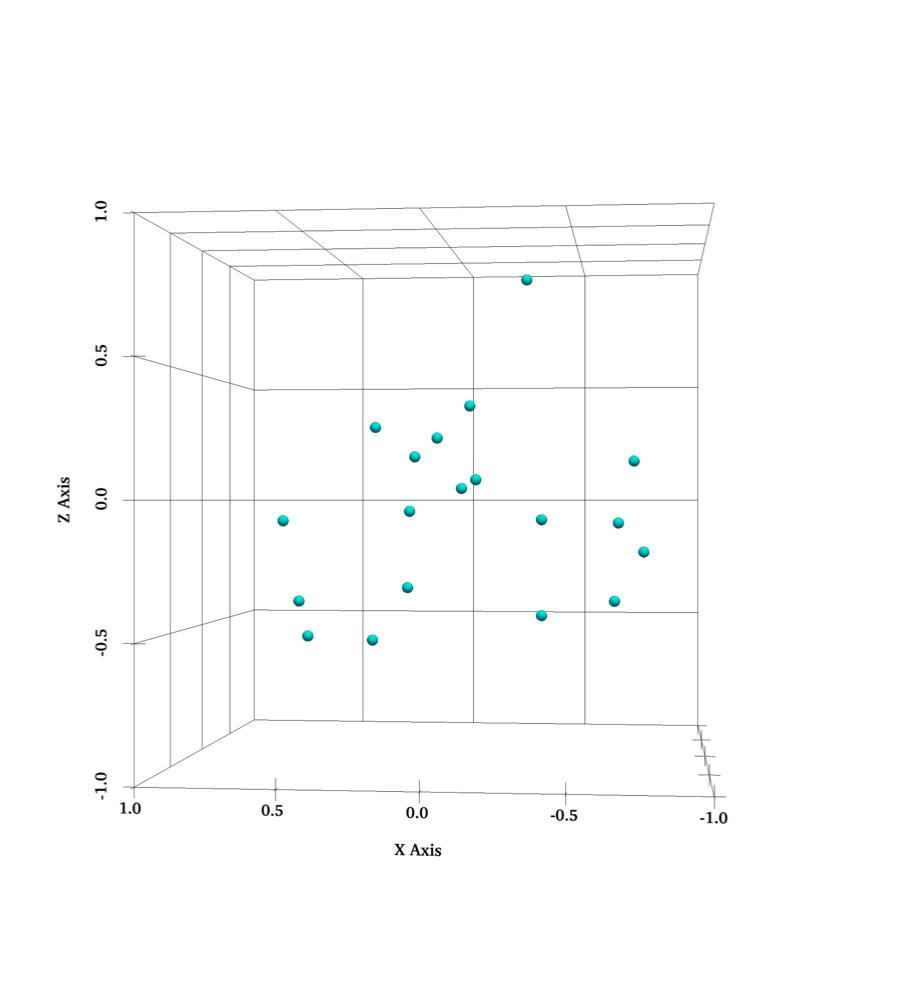
echo max search omega in deg/s 1.9349845201238391
19 solutions found meeting bound=0.001
IMAGEIO FFMPEG_WRITER WARNING: input image is not divisible by macro_block_size=16, resizing from (900, 1000) to (912, 1008) to ensure video compatibility with most codecs and players. To prevent resizing, make your input image divisible by the macro_block_size or set the macro_block_size to 1 (risking incompatibility).
IMAGEIO FFMPEG_WRITER WARNING: input image is not divisible by macro_block_size=16, resizing from (900, 1000) to (912, 1008) to ensure video compatibility with most codecs and players. To prevent resizing, make your input image divisible by the macro_block_size or set the macro_block_size to 1 (risking incompatibility).
[np.float64(0.19), np.float64(-0.2), np.float64(-0.05), np.float64(-0.01), np.float64(0.02), np.float64(0.0), np.float64(0.89), np.float64(0.21)]
shape: (2,)
Series: '' [f64]
[
0.186205
1.010103
]
[np.float64(1.07), np.float64(0.04), np.float64(1.35), np.float64(0.02), np.float64(0.01), np.float64(-0.0), np.float64(0.06), np.float64(1.3)]
shape: (2,)
Series: '' [f64]
[
0.186205
1.010103
]
[np.float64(1.47), np.float64(-0.12), np.float64(0.2), np.float64(0.03), np.float64(0.02), np.float64(-0.01), np.float64(1.11), np.float64(0.6)]
shape: (2,)
Series: '' [f64]
[
0.186205
1.010103
]
[np.float64(-0.65), np.float64(0.08), np.float64(-0.39), np.float64(-0.02), np.float64(-0.01), np.float64(-0.0), np.float64(-0.07), np.float64(1.39)]
shape: (2,)
Series: '' [f64]
[
0.186205
1.010103
]
[np.float64(0.1), np.float64(1.51), np.float64(-0.2), np.float64(0.01), np.float64(0.02), np.float64(-0.0), np.float64(0.91), np.float64(0.18)]
shape: (2,)
Series: '' [f64]
[
0.186205
1.010103
]
[np.float64(0.68), np.float64(-1.11), np.float64(0.12), np.float64(0.03), np.float64(-0.02), np.float64(0.01), np.float64(1.05), np.float64(0.4)]
shape: (2,)
Series: '' [f64]
[
0.186205
1.010103
]
[np.float64(0.58), np.float64(-0.04), np.float64(-0.55), np.float64(0.01), np.float64(0.02), np.float64(-0.0), np.float64(0.07), np.float64(1.22)]
shape: (2,)
Series: '' [f64]
[
0.186205
1.010103
]
[np.float64(0.61), np.float64(-0.01), np.float64(-0.4), np.float64(0.02), np.float64(0.03), np.float64(-0.0), np.float64(0.89), np.float64(0.22)]
shape: (2,)
Series: '' [f64]
[
0.186205
1.010103
]
[np.float64(1.04), np.float64(0.55), np.float64(-0.23), np.float64(0.02), np.float64(-0.01), np.float64(0.0), np.float64(0.07), np.float64(1.42)]
shape: (2,)
Series: '' [f64]
[
0.186205
1.010103
]
[np.float64(-0.76), np.float64(-0.46), np.float64(-0.22), np.float64(-0.01), np.float64(0.03), np.float64(0.0), np.float64(0.84), np.float64(0.27)]
shape: (2,)
Series: '' [f64]
[
0.186205
1.010103
]
import os
import matplotlib.pyplot as plt
import numpy as np
import polars as pl
import pyvista as pv
import vtk # noqa
import mirage as mr
import mirage.vis as mrv
f = '/Users/liamrobinson/Documents/maintained-research/mirage/examples/15-attitude-sdc-2025/data/'
dfs_delta = (
pl.read_parquet(os.path.join(f, 'delta_in.parquet')),
pl.read_parquet(os.path.join(f, 'delta_out_better_mat4.parquet')).sort('fun'),
)
dfs_echo = (
pl.read_parquet(os.path.join(f, 'echo_in.parquet')),
pl.read_parquet(os.path.join(f, 'echo_out_better_mat4.parquet')).sort('fun'),
)
dfs_synth = [(dfs_delta, 'delta', 1 / 100), (dfs_echo, 'echo', 1 / 1000)]
cdist = 8.0
bad_sol_opacity = 0.4
window_size = (900, 1000)
for (df_in, df), label, bound in dfs_synth:
for c in ['x0', 'xk']:
x = df[c].to_numpy().copy()
x[:, 3:6] /= df_in['epsecs'].max()
df = df.with_columns(pl.Series(name=c, values=x))
print(
f'{label} max search omega in deg/s',
np.rad2deg(
np.linalg.norm(df['x0'].to_numpy()[:, 3:6], axis=1, keepdims=True).mean()
),
)
df_sols = df.with_columns((-pl.col('fun')).exp().alias('likelihood'))
df_sols = df_sols.filter(pl.col('likelihood') > bound * df_sols['likelihood'][0])
print(f'{df_sols.height} solutions found meeting {bound=}')
x0 = np.array(df['x0'].to_list())
xk = np.array(df['xk'].to_list())
xk_sol = np.array(df_sols['xk'].to_list())
xk[:, 6:] = np.abs(xk[:, 6:])
xk_sol[:, 6:] = np.abs(xk_sol[:, 6:])
ang_traversed = np.abs(
np.rad2deg(mr.quat_ang(mr.mrp_to_quat(x0[:, :3]), mr.mrp_to_quat(xk[:, :3])))
)
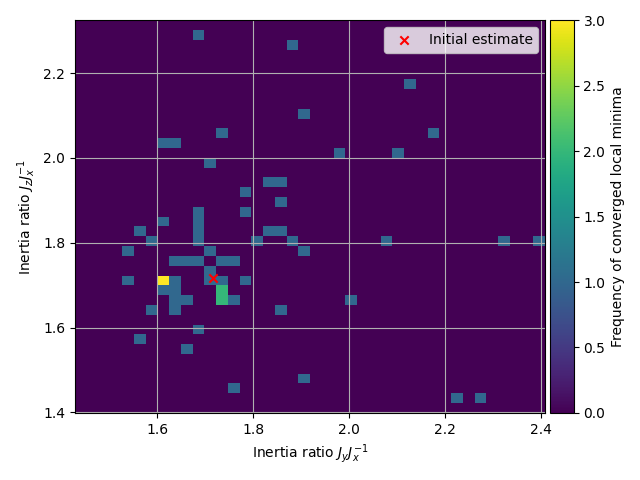
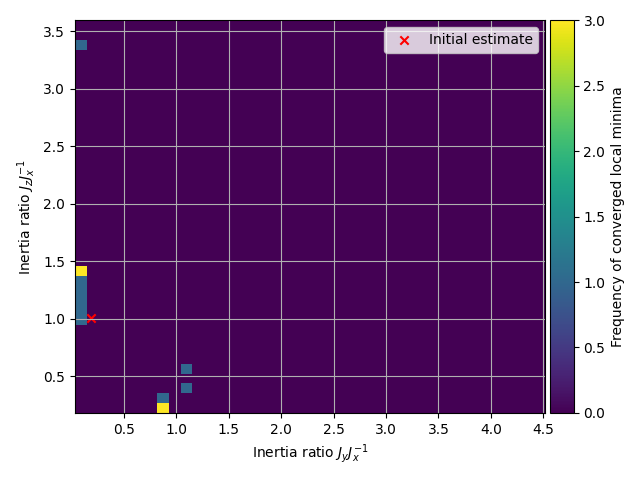
plt.figure()
rnge = np.percentile(xk_sol[:, 6:], axis=0, q=[5, 95]).T
h = plt.hist2d(*xk_sol[:, 6:].T, range=rnge, bins=40, cmap='viridis')[-1]
# plt.scatter(*xk_sol[:, 6:].T, c='r', marker='*', label='Candidate solutions')
plt.scatter(*x0[0, 6:], c='r', marker='x', label='Initial estimate')
plt.colorbar(h, label='Frequency of converged local minima', cax=mrv.get_cbar_ax())
plt.xlabel('Inertia ratio $J_y J_x^{-1}$')
plt.ylabel('Inertia ratio $J_z J_x^{-1}$')
plt.grid()
plt.legend()
plt.tight_layout()
plt.show()
p = pv.Plotter(window_size=window_size)
# mrv.scatter3(p, np.rad2deg(xk[:, 3:6]), opacity=bad_sol_opacity)
mrv.scatter3(p, np.rad2deg(xk_sol[:, 3:6]), point_size=25, color='gray')
lim = np.percentile(np.linalg.norm(np.rad2deg(x0[:, 3:6]), axis=1), 95)
p.show_grid(
# xtitle='$\mathbf{\omega_{x,0}}$ [deg/s]',
# ytitle='$\mathbf{\omega_{y,0}}$ [deg/s]',
# ztitle='$\mathbf{\omega_{z,0}}$ [deg/s]',
font_family='times',
font_size=10,
bounds=np.array([-1, 1, -1, 1, -1, 1]) * lim,
)
p.camera.position = (
cdist * lim * np.array(p.camera.position) / np.linalg.norm(p.camera.position)
)
mrv.orbit_plotter(p, video_name=f'{label}_ang_vel.mp4')
p.show()
p.screenshot(
f'/Users/liamrobinson/Documents/maintained-research/mirage/examples/15-attitude-sdc-2025/figs/{label}_ang_vel.png'
)
p = pv.Plotter(window_size=window_size)
mrv.scatter3(
p,
mr.quat_to_mrp(mr.quat_upper_hemisphere(mr.mrp_to_quat(xk_sol[:, :3]))),
point_size=25,
color='c',
)
p.show_grid(
# xtitle='$\\mathbf{p}_{1}$(0) [nondim]',
# ytitle='$\\mathbf{p}_{2}$(0) [nondim]',
# ztitle='$\\mathbf{p}_{3}$(0) [nondim]',
font_family='times',
font_size=12,
bounds=np.array([-1, 1, -1, 1, -1, 1]),
)
p.camera.position = (
cdist * np.array(p.camera.position) / np.linalg.norm(p.camera.position)
)
mrv.orbit_plotter(p, video_name=f'{label}_sigma.mp4')
p.show()
# endd
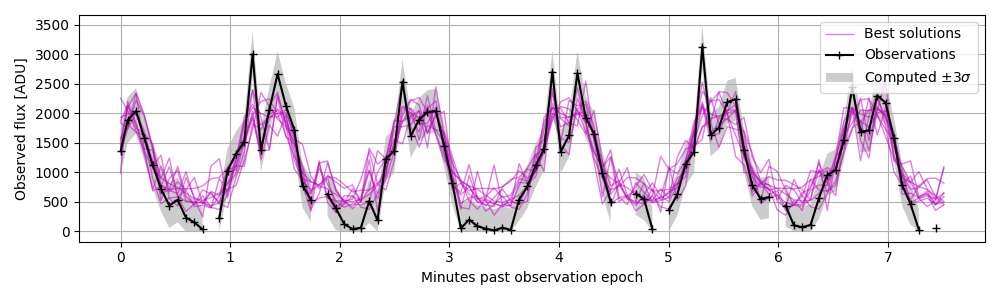
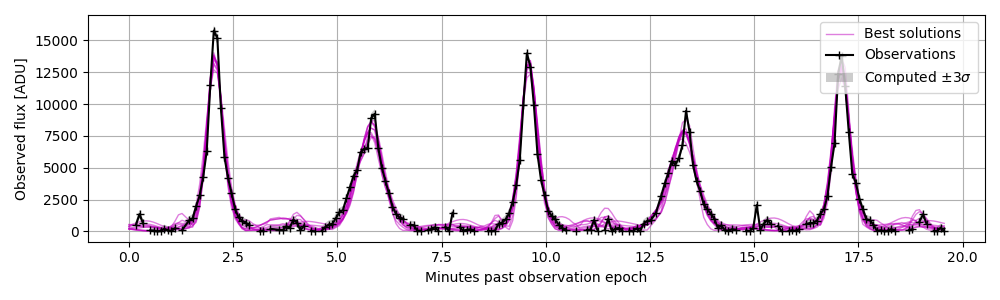
lc_obs = df_in['flux_adu'].to_numpy().flatten()
sigma_obs_counts = df_in['sigma_obs_counts'].to_numpy().flatten()
plt.figure(figsize=(10, 3))
for i in range(min(10, df_sols.height)):
d = df_sols[i].to_dict()
t = df_in['epsecs'].to_numpy().flatten() / 60
lc_est = d['lcs'].to_numpy().flatten()
print([np.round(x, 2) for x in d['xk'].to_list()[0]])
print(d['x0'][0][6:])
lc_est = (
lc_est / np.linalg.norm(lc_est) * np.linalg.norm(lc_obs[~np.isnan(lc_obs)])
)
# for i in d.keys():
# print(f'{i}: {d[i]}')
plt.plot(
t,
lc_est,
'm-',
alpha=0.5,
linewidth=1.0,
label='Best solutions' if i == 0 else None,
)
plt.plot(t, lc_obs, 'k+-', label='Observations')
plt.fill_between(
t,
np.clip(lc_obs - 3 * sigma_obs_counts, 0, np.inf),
np.clip(lc_obs + 3 * sigma_obs_counts, 0, np.inf),
alpha=0.4,
color='gray',
edgecolor=None,
label='Computed $\pm3\sigma$',
)
plt.xlabel('Minutes past observation epoch')
plt.ylabel('Observed flux [ADU]')
plt.grid()
plt.legend(loc='upper right')
plt.tight_layout()
plt.show()
Total running time of the script: (0 minutes 6.813 seconds)